
Home
>
Products > Laser Rangefinder Module > Ranging Lidar Module > 100Hz 10m ToF Single-point Ranging Lidar Module





100Hz 10m ToF Single-point Ranging Lidar Module
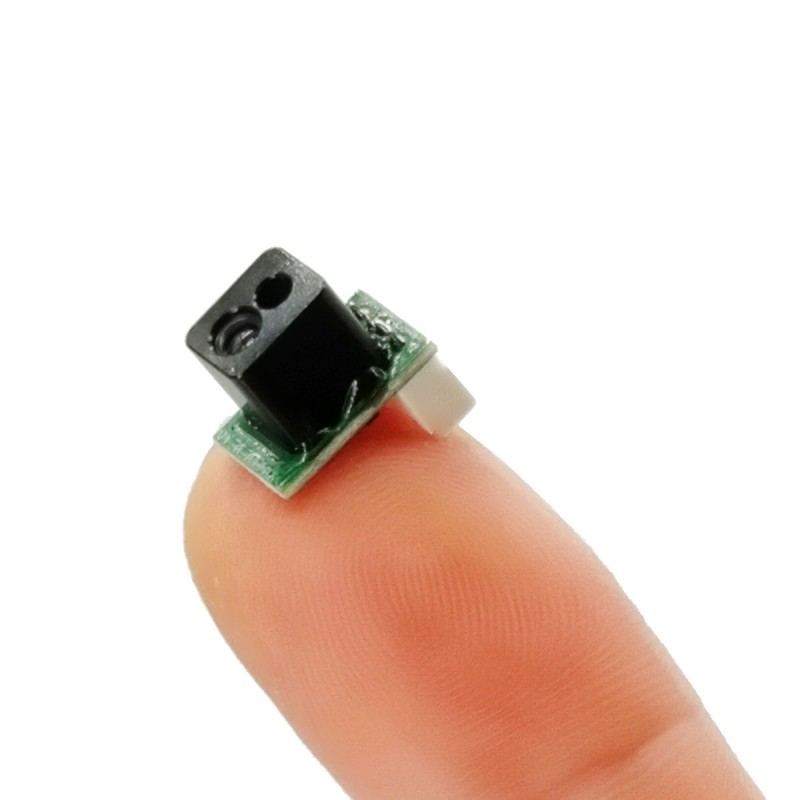
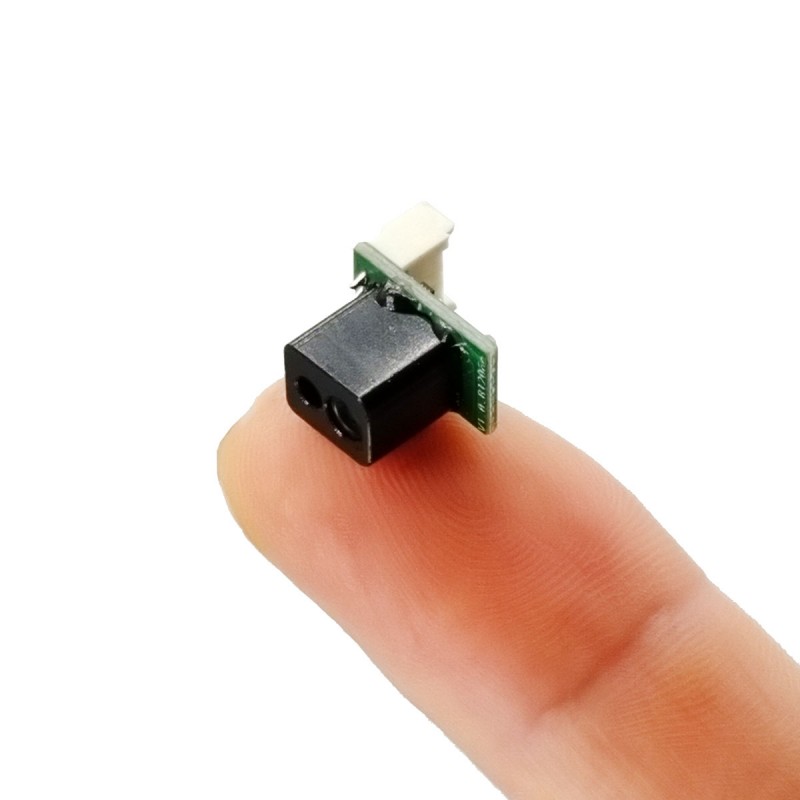
The STA-B10X laser ranging radar is a new laser ranging module launched by our company for fields such as drones, floor cleaning robots, and industrial robots. This product is based on the DTOF (Direct Time Of Flight) ranging principle and features small size, low cost, stable performance, and strong resistance to light interference. The product is easy to use, flexible to install, and provides a communication command set and upper computer, making it convenient for secondary development and highly cost-effective.
Send Inquiry PDF DownLoad
Product Description
Drone altitude control and obstacle avoidance
Robot obstacle avoidance
Industrial grade light curtain
AGV/UAV obstacle avoidance
High speed measurement and safety monitoring in the fields of transportation and industrial automation
Robot obstacle avoidance
Industrial grade light curtain
AGV/UAV obstacle avoidance
High speed measurement and safety monitoring in the fields of transportation and industrial automation
Detailed parameters of the product
| Order number | Model | STA-B10X |
| 1 | Ranging | 0.03-5m(10% Reflectivity), 0.03-10m(90% Reflectivity) |
| 2 | Range hole | 3cm |
| 2 | Range frequency | 100Hz |
| 3 | Ranging accuracy | 1% |
| 4 | Repeatability precision | ±10mm |
|
|
Resolution ratio | 1mm |
| 5 | Environmental light resistance | 100K Lux |
| 6 | Laser wave length | 905nm |
| 7 | Laser level | Class1 |
| 8 | Angle of field | 3° |
| 9 | Indicate the laser wavelength | N/A |
| 10 | Indicate laser level | N/A |
| 11 | Input voltage | 3.3V |
| 12 | Peak point current | N/A |
| 13 | Average current | N/A |
| 14 | Average power consumption | 0.4W |
| 15 | Communication mode | UART TTL |
| 16 | Levels of protection | N/A |
| 17 | Size (length x width x height) | 12x9x8.5mm |
| 18 | Weight | 1g |
| 19 | Working temperature | -30℃~+65℃ |
| 20 | Cable specifications | 4pin 1.25mm terminal, 10cm tinned loose wire |
| 21 | Customization scope | Supports customization of external structure, input voltage and output protocol |
Pin definition

|
||
| pin | Define / Wire color | User interface |
| 1 | TX (Red) | RX |
| 2 | RX (Black) | TX |
| 3 | GND (yellow) | Power supply - |
| 4 | 3.3V (Green) | Power supply + |
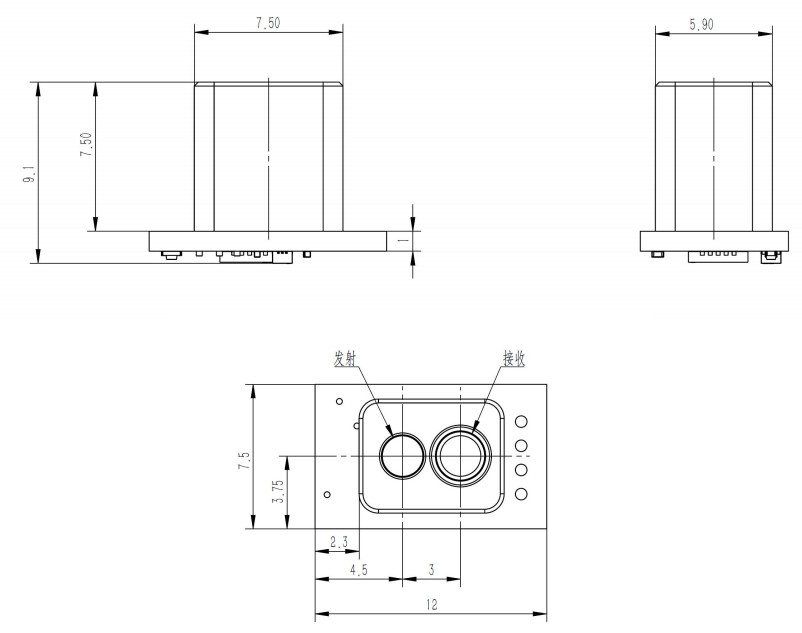
Module size
Communications protocol
Communication interface
| UART | |
| Default rate | 460800 (adjustable) |
| data bit | 8 |
| stop bit | 1 |
| even-odd check | not have |
Output format
Distance measuring module active output data after power on (4 bytes of data in one frame), output 65535 when it can not be measured
Example: 5C 02 11 EC
5C: fixed frame header 1 byte
02 11: two bytes to indicate that the measurement distance of 4354mm, the small end of the mode, the range of 0-65535mm
EC: from the beginning of the 02 to the end of the 11, to do the summation of the checksum to take the inverse of the one-byte
Checksum function: (starting from the second byte to the end of the penultimate byte, summing and inverting)
uint8_t Check_Sum(uint8_t *_pbuff, uint16_t _cmdLen)
{
uint8_t cmd_sum=0;
uint16_t i;
for(i=0;i<_cmdLen;i++)
{
cmd_sum += _pbuff[i];
}
cmd_sum = (~cmd_sum);
return cmd_sum;
}
Example: 5C 02 11 EC
5C: fixed frame header 1 byte
02 11: two bytes to indicate that the measurement distance of 4354mm, the small end of the mode, the range of 0-65535mm
EC: from the beginning of the 02 to the end of the 11, to do the summation of the checksum to take the inverse of the one-byte
Checksum function: (starting from the second byte to the end of the penultimate byte, summing and inverting)
uint8_t Check_Sum(uint8_t *_pbuff, uint16_t _cmdLen)
{
uint8_t cmd_sum=0;
uint16_t i;
for(i=0;i<_cmdLen;i++)
{
cmd_sum += _pbuff[i];
}
cmd_sum = (~cmd_sum);
return cmd_sum;
}
Precautions for use
- The product does not have reverse connection and over-voltage protection, please follow the specification for correct power supply and wiring
- The product laser is Class1, please do not look directly at the lens after the product is powered on
- When used in a dusty environment, it is recommended to add a red translucent glass or acrylic panel outside the lens of the product (with a transmittance rate of not less than 85% at the 905nm wavelength band)
- When contacting the product, please wear anti-static gloves to avoid the product from failure
- The product will not be effective in the measurement of Risk of failure when measuring highly reflective objects (e.g. 3M tape), mirrors, etc.
- The product laser is Class1, please do not look directly at the lens after the product is powered on
- When used in a dusty environment, it is recommended to add a red translucent glass or acrylic panel outside the lens of the product (with a transmittance rate of not less than 85% at the 905nm wavelength band)
- When contacting the product, please wear anti-static gloves to avoid the product from failure
- The product will not be effective in the measurement of Risk of failure when measuring highly reflective objects (e.g. 3M tape), mirrors, etc.
Hot Tags: 100Hz 10m ToF Single-point Ranging Lidar Module, Manufacturers, Suppliers, Factory, China, Made in China, Customized, High Quality
Related Category
905nm Laser Range Finder Module
1535nm Laser Range Finder Module
1570nm Laser Range Finder Module
1.54um Laser Rangefinder Module
1064nm Laser Target Designator
Anti drone ststem module
Ranging Lidar Module
Send Inquiry
Please feel free to give your inquiry in the form below. We will reply you in 24 hours.







